



大数据分析中带有动画的常用路径规划算法
2020-11-13
点击量:次
大数据分析中带有动画的常用路径规划算法,该存储库实现了机器人技术中常用的一些路径规划算法,包括基于搜索的算法和基于采样的算法。我们为每种算法设计了动画以显示运行过程。
目录结构
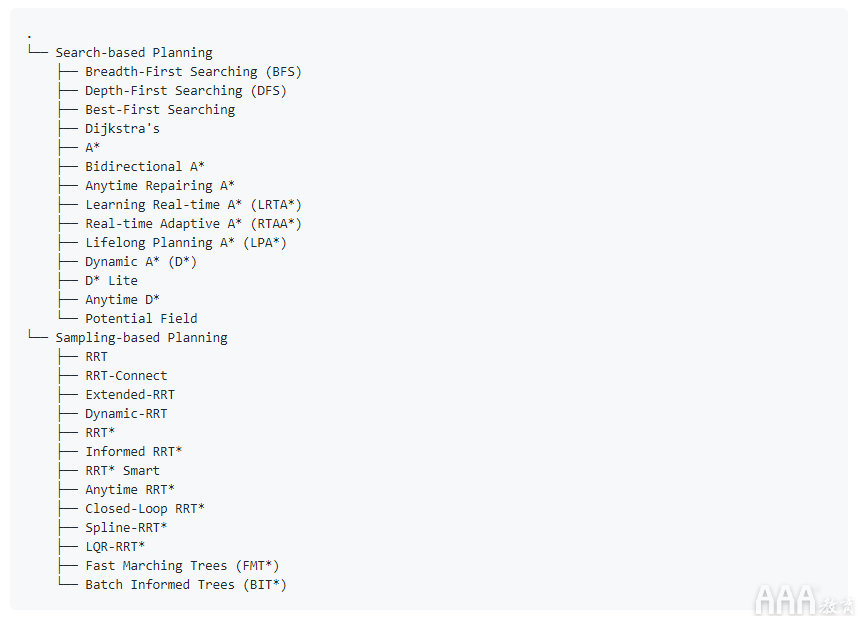
动画-基于搜索
最佳第一&Dijkstra
A *和A *变体
动画-基于采样
RRT和变体
文件
搜索库计划
1)A *:启发式确定最小成本路径的正式基础
2)学习实时A *:实时搜索学习:统一框架
3)实时自适应A *:实时自适应A *
4)终身计划A *:终身计划A *
5)随时修复A *: ARA *:随时A *具有次优性的可界
6)D *:针对部分已知环境的最佳和有效路径规划
7)D * Lite: D * Lite
8)字段D *:字段D *:基于插值的路径规划器和重新规划器
9)随时D *:随时动态A *:随时,重新计划算法
10)聚焦D *:用于实时重新计划的聚焦D *算法
11)势场, [PPT]:操纵器和移动机器人的实时避障
12)混合A *:自动驾驶路径规划中的实用搜索技术
基于抽样的计划
1)RRT:快速探索随机树:路径规划的新工具
2)RRT连接: RRT连接:一种有效的单查询路径规划方法
3)Extended-RRT:机器人导航的实时随机路径规划
4)动态RRT:使用RRT重新计划
5)RRT *:用于优化运动计划的基于采样的算法
6)Anytime-RRT *:使用RRT *的随时运动计划
7)闭环RRT *(CL-RRT *):实时运动规划及其在自主城市驾驶中的应用
8)Spline-RRT *:基于样条RRT *的最佳路径规划,用于在三维环境中运行的固定翼无人机
9)LQR-RRT *:具有自动衍生的扩展启发法的基于采样的最佳运动计划
10)RRT#:松弛方法在基于采样的算法中用于最佳运动规划
11)RRT * -Smart:RRT *的快速收敛实施,朝着最佳解决方案发展
12)消息灵通的RRT *:基于可采样椭圆启发法的直接采样,重点关注基于采样的最佳路径规划
13)快速行进树(FMT *):一种基于快速行进采样的方法,可以在多个维度上进行最佳运动规划
14)使用下限(MPLB)进行运动规划:使用成本下限进行渐近最优运动规划
15)批处理通知树(BIT *):通过隐式随机几何图的启发式引导搜索进行基于采样的最佳规划
16)高级批次信息树(ABIT *):采用高级图搜索技术的基于采样的计划
17)自适应信息树(AIT *):通过自适应启发式算法的快速渐近最优路径规划
 长按识别二维码,加关注
长按识别二维码,加关注
- ↓ ↓ ↓ 继续阅读与本文标签相同的文章
- 大数据分析中带有动画的常用路径规划算法
- 大数据分析
- << 上一篇 什么是平面设计
- >> 下一篇 UI设计中的通用包容性